内容详情 您现在的位置是: 首页> 其他随笔
深入理解Go语言(03):scheduler调度器 - 基本介绍
发布时间:2022-05-30 09:17 已围观:2682
摘要深入理解Go语言(03):scheduler调度器 - 基本介绍
一:什么是调度
平常我们在生活中会有哪些调度的例子呢?比如十字路口的红绿灯,它就是一种调度系统。在交通十字路口,每个路口上多多少少有一些车辆,为了限制这些车辆不随意行驶,就建起了红绿灯调度系统。红绿灯可以有序的调度这些车辆行驶,使这些车辆快速的通过路口。
那为什么需要红绿灯来进行调度呢?
1:使车辆有序的行驶不至于相撞
2:使车辆能快速的通过路口
上面的红绿灯系统有哪些元素呢?1. 红绿灯系统-负责调度车辆 2. 车辆 3. 十字路口
由此我们可以看出一个调度系统基本元素有2个:1. 调度系统 2. 被调度的东西 3. 应用的资源
因为资源(十字路口)是有限的,每个方向只有一条路可供车辆行驶,而车辆在每个路口又是很多的,这是不是就形成了资源和使用者之间的矛盾了,为了解决这个矛盾,红绿灯调度系统应运而生。
如果我有多层路口,比如高架桥,多了一层,那走上面的车辆是不是就不需要等红绿灯了。这应该是调度系统在生活中的启示。
所以我们可以说调度系统是协调被调度的物件合理的使用资源。
也可以回顾下以前学习Linux系统中的调度,被调度的物件是线程或者进程,资源是cpu,为了协调有限的cpu资源在多个线程(进程)中合理公平使用,就有了调度器。
那golang中的调度呢?
跟上面的红绿灯调度有一些相似点。
golang的调度是为了多个协程能合理的利用线程。这里的协程(goroutine)相当于车辆了,线程相当于十字路口(也许不恰当)。
go在运行时,会运行很多协程goroutine,也就是我们常说的并发,go为了能使这些协程有序的快速的在线程上执行,就需要进行调度了。
还有,go为了方便的控制goroutine,比如把当前线程中的goroutine移交到其他线程继续执行,从而避免应线程阻塞影响协程的运行。
还有,go中引入了GC,在执行GC的时候,要求所有goroutine停止,自己实现调度器,就可以方便实现这个功能了。
相对于操作系统的线程来说,goroutine更加的轻量,占用的内存更小,上下文进行切换时换入换出的数据也更少。
二:goroutine简介
我们说Go是语言级别的并发语言。为什么是语言级别?那不还有系统级别,对,操作系统级别就实现了多线程,多进程这种并发。
有2个支持高并发的模型:CSP 和 Actor(erlang)。Go 选择了CSP,Go为了提供更容易的并发使用方法,提供了2个重要的概念 goroutine和channel。
goroutine来自协程的概念,让一组可复用的函数运行在一组线程之上,即使有协程阻塞,该线程的其他协程也可以被runtime调度,转移到其他可运行的线程上。最关键的是,程序员看不到这些底层的细节,这就降低了编程的难度,提供了更容易的并发。
goroutine非常的轻量,只占几KB,并且这几KB足够goroutine运行完。所以我们运行成千上万的goroutine成为可能,因为不会占用太多的内存资源。
channel为goroutine之间提供了通信功能。
不要通过共享内存来通信,而应该通过通信来共享内存
三:go调度模型GMP
go的调度模型,一开始并不是GPM模型,而是经过了一个发展过程。
老的调度模型只有G和M,没有P。为什么只有GM呢?因为这是一个简单的模型,最开始开发时一定容易实现。
M:代表OS线程,它是运行goroutine的
G:就是goroutine
它还有一个重要的数据结构:全局队列global runqueue。
为什么会有队列?它有什么作用?
全局队列是用来存放goroutine(G)的。启动那么多goroutine,总要一个地方把G存起来以便M来调用。
多个M会从这个全局队列里获取G来进行运行。
GM模型如下图: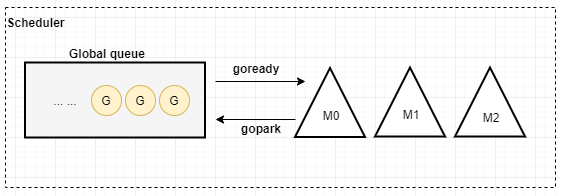
M要执行G,或者把G放回去,都要访问全局队列,而且M还是多个,所以必须对全局队列加锁保证互斥。
这必然导致多个M对锁的竞争。这也是老调度器的一个缺点。
其实老调度器有4个缺点:详见Scalable Go Scheduler Design Doc
创建、销毁、调度G都需要每个M获取锁,这就形成了激烈的锁竞争
M转移G会造成延迟和额外的系统开销。
M中的mcache是用来存放小对象的,mcache和栈都和M关联造成了大量的内存开销和差的局部性
系统调用导致频繁的线程阻塞和取消阻塞操作增加了系统开销。
所以Go语言在2012年重新设计了调度器方案(Scalable Go Scheduler Design Doc,设计方案)。
在GO1.1中新调度器引入了:
P(processor),它包含了运行goroutine的资源。如果线程M想运行G(goroutine),比如先获取P,P中还包含了可运行的G队列。
work stealing:当M绑定的P没有可运行的G时,它可以从其他运行的M那里偷取G来运行。这个的作用就是避免M因为没有可运行的G时产生饥饿的问题。
work stealing算法地址
新调度器就是一个GPM模型了:
G:goroutine,用户级别的线程(协程)。我们在程序里用go关键字创建的一个协程。
P:processor,相当于一个处理器,它包含了goroutine运行的资源,M必须和一个P关联才能运行G。P还包含自己的本地队列(local runqueue)来保存G。为什么要搞一个本地队列?这样就可以避免竞争锁了。
M:工作线程,代表机器(machine)。这个线程是OS来处理的,OS负责把线程放到cpu上去运行。
当然新调度器也有一个很重要的数据结构:全局运行队列 global runqueue。
题外话:引入P,解决了老调度器的一些问题,但是同时也增加了调度器的复杂度。这个是必然的,引入新东西必然会增加系统的复杂度。就看能不能很好的解决问题,权衡利弊。
GPM模型如下图: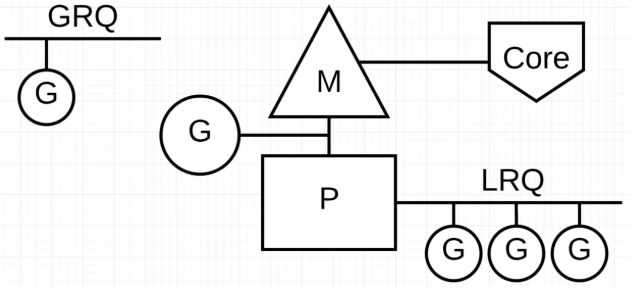
(图来自:https://www.ardanlabs.com/blog/2018/08/scheduling-in-go-part2.html)
GRQ:全局队列 global runqueue
LRQ:P的本地队列 local runqueue
G:goroutine协程
M:OS的线程,用来绑定P,运行G,真正执行指令的人。
P:processor,goroutine运行时所需要的资源。P的数量可以用runtime.GOMAXPROCS()来控制。
每个P会分配一个LRQ(本地队列)去处理P的上下文要执行的Goroutines 。这些Goroutines会在绑定到P的M上进行上下文的切换。GRQ(全局队列)会处理还没有分配到P上的Goroutines 。
新的调度器中有全局队列,但功能已经被弱化了,当M执行work stealing从其他P偷不到G时,它可以从全局队列获取G。
抢占式调度
G-P-M模型的实现算是Go scheduler的一大进步,但Scheduler还有一个很头疼的问题,那就是不支持抢占式调度。
为什么要抢占式调度?
因为一旦某个G出现死循环或者永久循环的代码逻辑,那么G将永久占用分配给他的P和M,位于同一个P中的其他G将得不到调度,出现饿死的情况。还有一种情况,当只有一个P(GOMAXPROCS=1),
整个Go程序中的其他G都将饿死。于是Dmitry Vyukov提出了《Go Preemptive Scheduler Design》
并在Go 1.2中实现了“抢占式”调度
一些说明:
1、M绑定P,才可以不断的去运行G,如果M没有可运行的G,也可以抢占式调度(依靠sysmon)
2、从上图可以看出,每个P都有自己的本地队列,也有一个全局队列
3、M,P,G三者的数量,M默认10000,可以设置,通过SetMaxThreds修改,P默认是CPU的核数,可以设置,通过GOMAXPROCS修改,
G没有数量限制,可以创建成百上万个,甚至百万。
4、M可以与P解绑,也可以休眠
新的调度器有没有缺点?有
1、 runqueue只是一个没有优先级的队列,所以会按照先进先出的顺序来运行Goroutine。
2、调度goroutine时公平性没有很好的保证:已经提议进行修改。
3、 runqueue没有利用缓存,使用缓存[栈而不是队列]可以加速Goroutine的访问。
四:参考:
https://juejin.im/post/5ce11a39f265da1baf7cbc61 理解golang调度之二 :Go调度器
https://www.youtube.com/watch?v=YHRO5WQGh0k GopherCon 2018: Kavya Joshi - The Scheduler Saga
https://qcrao.com/2019/09/02/dive-into-go-scheduler/ 深度解密Go语言之scheduler
https://www.ardanlabs.com/blog/2018/08/scheduling-in-go-part2.html
https://tonybai.com/2017/06/23/an-intro-about-goroutine-scheduler/
== just do it ==
声明:本文内容摘自网络,版权归原作者所有。如有侵权,请联系处理,谢谢~
转发:九卷--https://www.cnblogs.com/jiujuan/p/12735559.html
赞一个 (382)








